



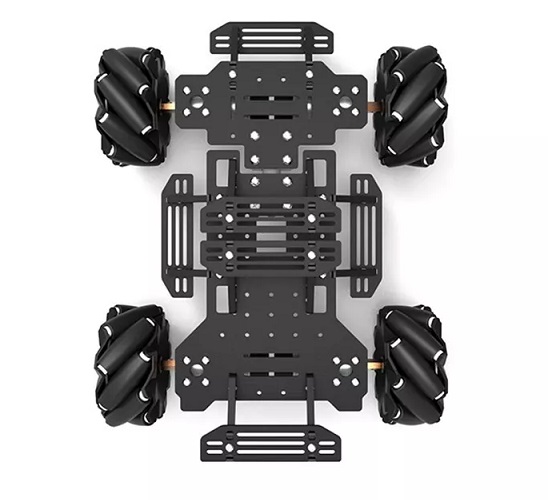

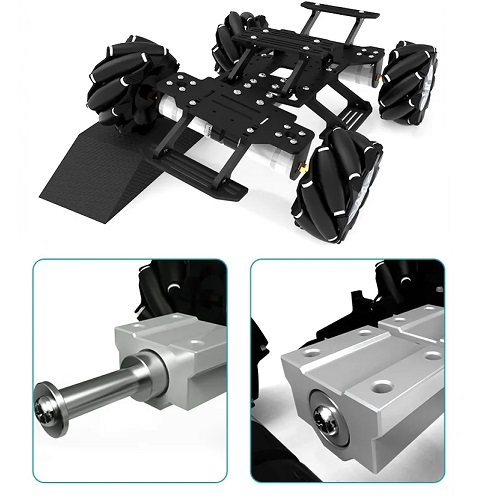










Plataforma robótica móvil con tracción en las 4 ruedas basadas en ruedas Mecanum y sistema de suspensión de alta precisión que permiten que las ruedas estén siempre en contacto con el suelo. Contiene dos ruedas izquierdas y dos ruedas derechas que están conectadas a motores independientes. Dependiendo de la dirección y velocidad de cada rueda, la plataforma móvil puede moverse hacia adelante, hacia atrás, hacia los lados y en cualquier otra dirección deseada o girar.
No contiene sistemas de control ni de alimentación y es compatible con sistemas de desarrollo Arduino, Raspberry Pi y STM32.
Características:
- Velocidad máxima sin carga: 1.3m/s
- Máxima carga: 7kg
- 4 ruedas omnidireccionales de 97mm
- 4 motores, con codificador Hall magnético incremental bidireccional AB
- Material de fabricación: fibra de vidrio
- Las placas de fibra de vidrio tienen orificios de montaje de varios tamaños para facilitar la instalación de fuente de alimentación, placa controladora y otros accesorios (no incluidos)
- Con sistema de suspensión, útil cuando el terreno es irregular o al pasar obstáculos
- Peso del chasis: 1.67kg
- Dimensiones: 33x245x108mm
Características de los motores:
- Tipo: motor con encoder
- Voltaje promedio: 12V
- Corriente promedio: 0.4A
- Velocidad del motor: 400RPM
- Tasa de reducción: 21.3
- Conector: PH2.0 de 6 pines
Codificador Hall magnético incremental bifásico AB
- Voltaje de entrada: 3.3/5.0VDC
- Interfaz: PH2.0-6P
- Señal de salida: onda cuadrada fase AB
- Frecuencia de respuesta: 100 Khz
- Pulso: 11/RPM