

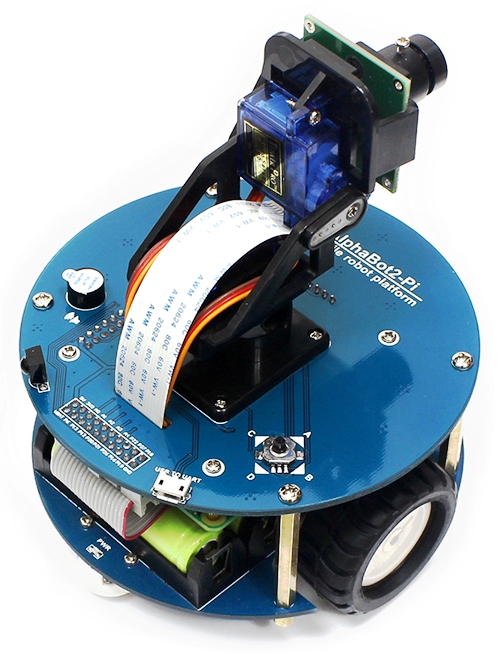
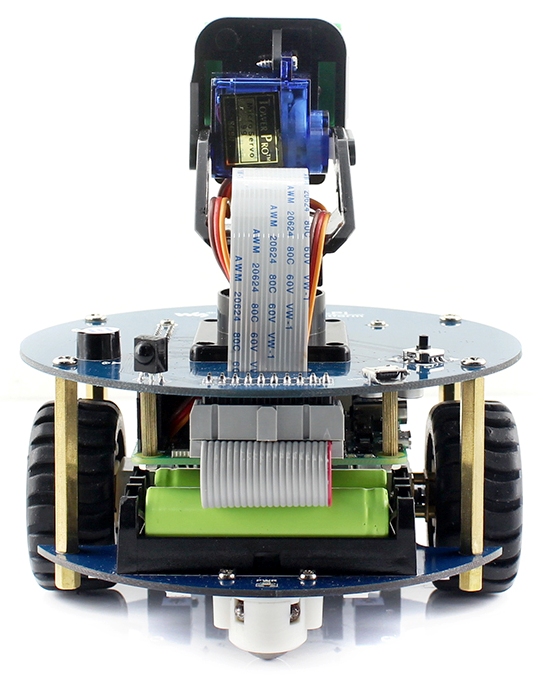










Este kit robótico está diseñado para utilizarse con la tarjeta Raspberry Pi modelo B, incluye funciones como seguimiento de línea, evasión de obstáculos, control remoto por medio de WiFi/Infrarrojo/Bluetooth, monitoreo de video, etc. La plataforma contiene dos capas para mayor estabilidad y compatibilidad.
Características:
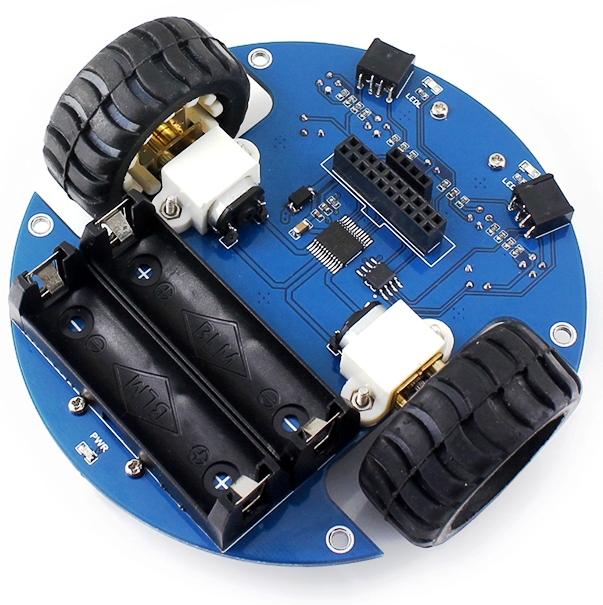
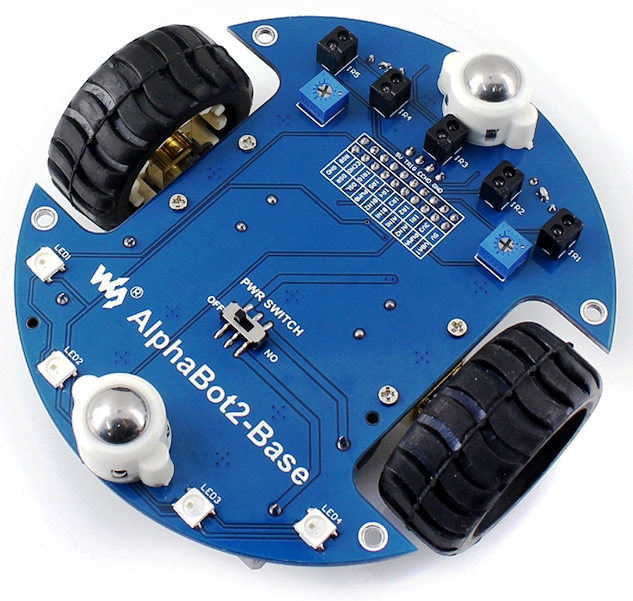
Base:
- Sensor infrarrojo de 5 canales, salida analógica, combinada con algoritmo PID, seguimiento estable de línea
- Puente H dual driver TB6612FNG
- N20 micro gear motor, con piñones de metal, bajo ruido, alta exactitud
- LEDs RGB
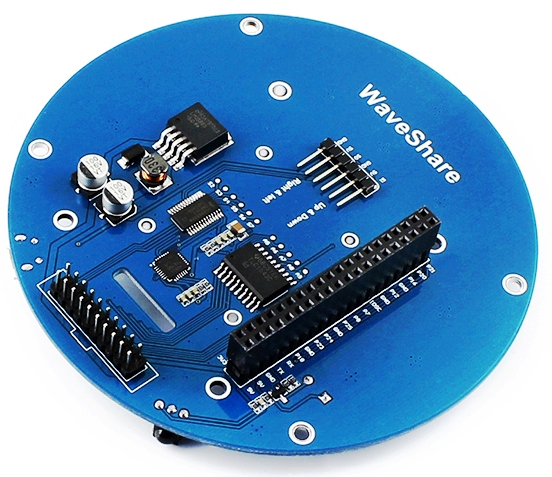
Parte superior:
- Regulador de voltaje LM2596, prove a la tarjeta Raspberry Pi modelo B con voltaje estable de 5V
- Chip de adquisición AD TLC1543, permite a la tarjeta Raspberry Pi modelo B utilizar sensores analógicos
- Controlador servo PCA9685
- Conversor CP2102 UART, para controla fácilmente a la tarjeta Raspberry Pi modelo B vía UART
Base:
- AlphaBot2 control interface: for connecting sorts of controller adapter board
- Ultrasonic module interface
- Obstacle avoiding indicators
- Omni-direction wheel
- ST188: reflective infrared photoelectric sensor, for obstacle avoiding
- ITR20001/T: reflective infrared photoelectric sensor, for line tracking
- Potentiometer for adjusting obstacle avoiding range
- TB6612FNG dual H-bridge motor driver
- LM393 voltage comparator
- N20 micro gear motor reduction rate 1:30, 6V/600RPM
- Rubber wheels diameter 42mm, width 19mm
- Power switch
- Battery holder: supports 14500 batteries
- WS2812B: true color RGB LEDs
- Power indicator
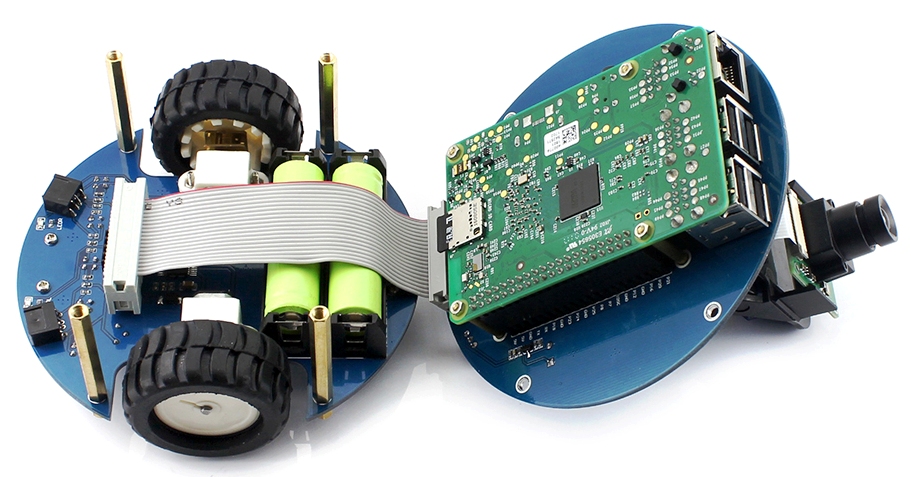
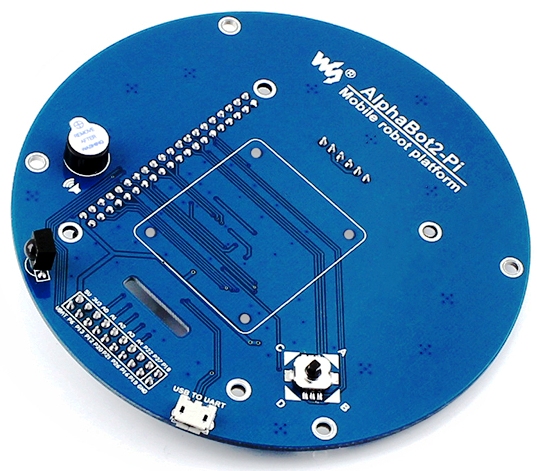
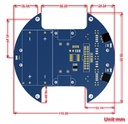
Parte Superior:
- AlphaBot2 control interface: for connecting AlphaBot2-Base
- Raspberry Pi interface: for connecting Raspberry Pi 3 Model B
- Servo interface
- USB TO UART: easy for controlling the Pi via UART
- LM2596: 5V voltage regulator
- TLC1543: 10-bit AD acquisition chip, allows the Pi to use analog sensors
- PCA9685: servo controller, make it more smoothly to rotate the pan head
- CP2102: USB TO UART converter
- Joystick
- IR receiver
- Buzzer
Enlace de interés:
Click Aquí
Enlace al fabricante:

![]()
Palabras claves:carro, robot, plataforma robótica, Alphabot2